Research themes

Sensing, perception and estimation
This research theme focuses on Simultaneous Localisation and Mapping (SLAM), sensing and data interpretation in changing environmental conditions, sensing and perception using conventional and unconventional sensors, long term perception, Artificial Intelligence and data analytics based reasoning.
Selected projects:
Visual Simultaneous Localisation and Mapping in Deformable Environments
(ARC Discovery Project DP200100982, Shoudong Huang, Liang Zhao, 2020-2022)
This project aims to investigate the problem of building a three-dimensional map of a deformable environment in real-time using images and at the same time localising the camera within the map. This project expects to generate new knowledge in the area of simultaneous localisation and mapping in deformable environments using vision and inertial sensors. Expected outcomes include in-depth understanding of the fundamental sensing requirements for the problem to be solvable, and efficient algorithms for achieving accurate three-dimensional reconstruction of deformable environments. The research outcomes from this project offer significant benefits to diverse areas such as minimally invasive robotic surgery.
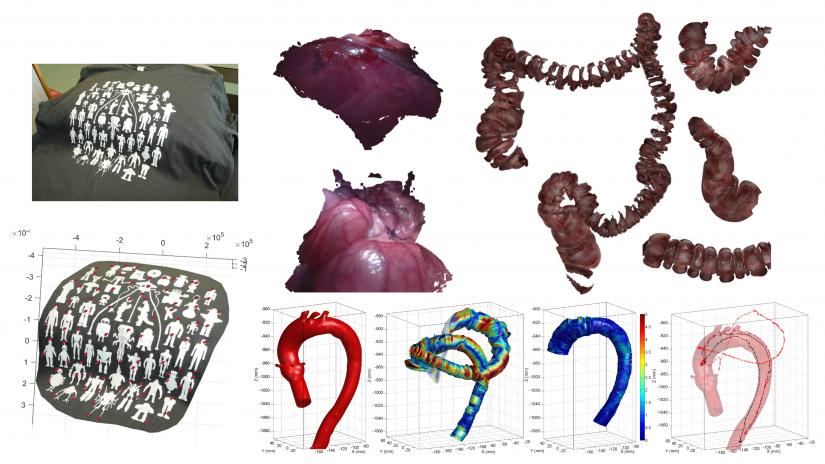
SLAM in Deformable Environments - Image supplied
Robotic Perception with Unconventional Sensors
(ARC DP210101336, Teresa Vidal Calleja and Gamini Dissanayake, 2021-2023)
The most common sensors in robotics measure distance and bearings to objects in the environment. These sensors are, for example, cameras or laser range finders. With distance information a robot can localise within a known map, or build a map of the environment given its position and orientation at all times. It could also perform localisation and mapping concurrently to navigate unknown environments. Our project focuses on a different type of sensors, what we call “unconventional sensors”. Examples of these sensors include magnetic, acoustic or event-based sensors. These unconventional sensors do not necessarily measure distance and/or bearings to objects in the environment. Therefore, it is not possible today to perform navigation tasks using this sensing technology. The main goal of this ARC discovery project is to develop the theory and algorithms to allow unconventional sensors to localise, map and characterise unknown environments. The outcomes of this research have the potential to improve the effectiveness of critical civil infrastructure maintenance technology through accurate and reliable inspections, and the reduced need for human intervention.
Development of Globally Optimal Solutions to Simultaneous Localization and Mapping for Robot Navigation
(ARC Discovery Project DP120102786, Shoudong Huang and Gamini Dissanayake, 2012-2014)
Robot navigation in unknown environments requires a robot to simultaneously construct a map in real-time and localize itself within the map, particularly in the absence of external location reference such as a global positioning system. The project will develop in-depth understanding of the fundamental structure and properties of nonlinearity involved in Simultaneous Localization and Mapping (SLAM); efficient and reliable algorithm for solving very large scale SLAM problems; and reliable real time monocular SLAM algorithms. This will result in the development of robots that can reliably and continuously navigate in unknown environments
Robotic systems
This research theme focuses on complex robotic systems design and integration, robot navigating and interacting with objects in highly complex environments, biologically inspired robots, underwater robots, drones, and soft grippers.
Selected projects:
An Intelligent Robotic System for Underwater Structure Maintenance
(ARC LP150100935, Dikai Liu, Gamini Dissanayake, Shoudong Huang, Kenneth Waldron, 2015-2018)
This project aims to build a theoretical and experimental foundation for developing robots for underwater structure maintenance in near surface and tidal environments where water current and wave action can be strong. A novel intelligent robotic system with multiple arms will be developed. The project will address research challenges associated with perception, mapping, planning and control, and develop methodologies that enable the realisation of such robotic systems. The outcomes will have immediate significant impacts on marine robotics research and its industrial applications, on improving productivity, and on improving occupational health and safety by reducing humans working in such hazardous environments.
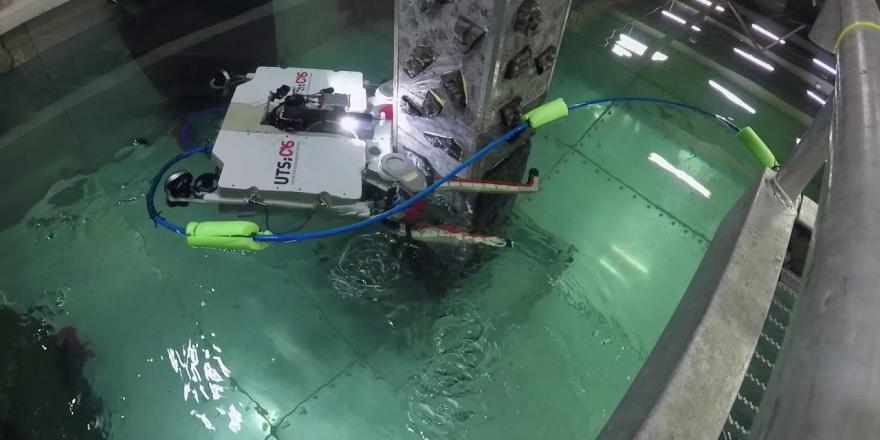
SPIR: Submersible Pile Inspection Robot
Biologically Inspired Robotic System for Steel Bridge Condition Assessment
(ARC Linkage Project LP100200750, Dikai Liu, Kenneth Waldron, and Gamini Dissanayake, 2010-2014)
This project aims to develop a novel robotic system that is capable of adhering to, and climbing over complex features characteristic of many steel bridges, by adapting principles of biological systems such as arthropods. The robot will acquire information to facilitate condition assessment of bridge structures while greatly reducing the associated occupational health and safety risks. The project will contribute fundamentally to understanding of the geometric design, and coordination software of climbing robots, and autonomous exploration and mapping in partially known environments. The key challenges to deploying an autonomous climbing robotic system will be addressed and a prototype device will be evaluated in the field.

CROC2: An autonomous climbing robot for confined space inspection_ Sydney Harbor Bridge_ UTS & RMS
A Robotic System for Steel Bridge Maintenance
(ARC Linkage Grant LP0776312, Dikai Liu, Gamini Dissanayake and Quang Ha, 2007-2010)
The project will develop methodologies to enable a robotic system to perform maintenance tasks associated with complex civil infrastructure. The primary application is to autonomously remove paint containing hazardous materials such as lead and asbestos from important traffic infrastructures such as steel bridges. A prototype autonomous system will be developed and the key issues in deploying such a system in the field will be addressed. The outcomes will lay the foundation for the use of autonomous robots in infrastructure maintenance, significantly improve worker's occupational health and safety, greatly reduce cost and improve the efficiency and productivity of maintenance operations.
Control, planning and coordination
This research theme focuses on real-time robot control and trajectory planning, robot path planning, multi robot cooperation, coordination, and long term operation.
Selected projects:
When every second counts: Multi-drone navigation in GPS-denied environments
(ARC DP200101640, Luis Gonzalez, Jonghyuk Kim, Sven Koenig, Kevin Gaston, 2020-2022)
The aim of this research is to develop a framework for multiple Unmanned Aerial Vehicles (UAV), that balances information sharing, exploration, localization, mapping, and other planning objectives thus allowing a team of UAVs to navigate in complex environments in time critical situations. This project expects to generate new knowledge in UAV navigation using an innovative approach by combining Simultaneous Localization and Mapping (SLAM) algorithms with Partially Observable Markov Decision Processes (POMDP) and Deep Reinforcement learning. This should provide significant benefits, such as more responsive search and rescue inside collapsed buildings or underground mines, as well as fast target detection and mapping under the tree canopy.
Automated Detection and Assessment on Debonding of Facade Panels
(ARC Discovery Project DP200102497, Lin Ye, Ye Lu and Dikai Liu, 2020-2022)
Disintegration of the external façade (with tiles, plates, etc.) of high-rise buildings presents a great challenge and a threat to community. This project develops fundamental knowledge and algorithms that underpin the deployment of a new technique for fast and automated quantitative integrity assessment of façade units of high-rise buildings, integrating mechanisms of directional acoustic waves, vibro-acoustics of façade tiles or panels, laser sensing technology, deep learning algorithms and drone technology. Outcomes of this project are critical for implementing the new technology for enhanced safety to community and the development of new procedures for driving down maintenance costs of the external façade of high-rise buildings.
Efficient Strategies for Coordinating Autonomous Vehicles for Maximising Australia's Waterfront Productivity
(ARC LP0882745, Dikai Liu, Shoudong Huang, Gamini Dissanayake, Daniel Pagac, 2008-2011)
This project aims to investigate efficient strategies for coordinating large autonomous vehicle teams in complex and dynamic environments. Comprehensive models for a novel simultaneous task allocation and motion coordination approach are developed, along with practically deployable algorithms that contemplate the dynamics of the vehicles, environment and traffic conditions. Software incorporating these algorithms is developed for testing and use in a fully automated container terminal, located in Australia.
Human robot interaction
This research theme focuses on robots understanding human intention and behaviours, human and robots collaboratively achieve missions, physical human robot collaboration (pHRI), and brain- robot interaction.
Selected projects:
Brain Robot Interface for Physical Human Robot Collaboration
(ARC Discovery Project DP210101093, Chin-Ting Lin and Dikai Liu, 2021-2023)
This project aims to discover new knowledge of cognitive conflict and develop models and algorithms that enable intuitive physical human-robot collaboration to jointly conduct laborious tasks in complex, unstructured environments. It proposes to build on responses in the human brain when a robot does not operate in a way the human expects. Conflict models and prediction method are planned using advanced machine learning algorithms. The model and algorithms are intended to be integrated into an innovative brain-robot interface for field testing in a real-world industrial task. Translation of the outcomes to industry is expected to produce substantial economic and societal benefits through improved productivity and safety.
Assistive Robotic Systems for Augmenting Human Strength in Industrial Applications
(ARC Linkage Project LP140100950, Dikai Liu, Kenneth Waldron, Gamini Dissanayake, G. Williams, 2014-2017)
This project aims to develop a theoretical foundation, design strategies and a full-scale prototype of an assistive robotic systems that is are able to provide responsive physical assistance, as needed and when appropriate, to human-workers conducting laborious tasks in hazardous and complex industrial environments.
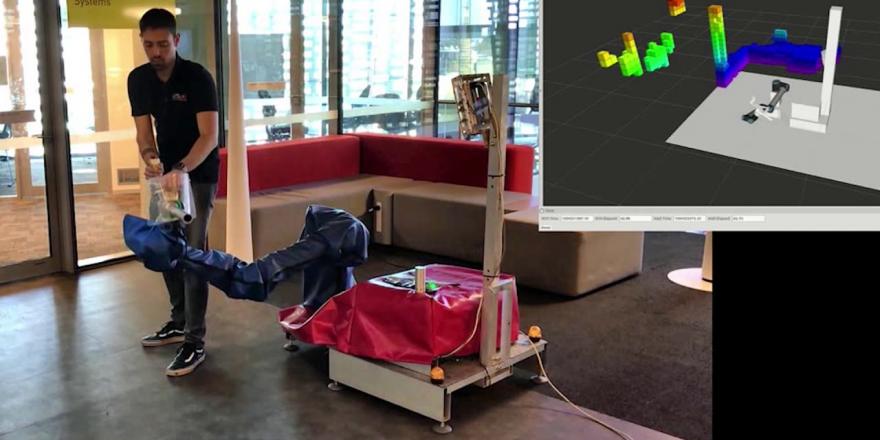
ANBOT: An assistive co-worker for abrasive blasting