


- Posted on 14 May 2021
- Updated on 14 May 2021
- 5-minute read
UTS researchers have developed a first-of-its-kind autonomous robot able to clean and inspect underwater structures, allowing maintenance crew to work safely from above the waves.
It’s a tough job for the divers who work to ensure the underwater supports for important infrastructure like bridges and wharves are well maintained and strong. They may have to fight strong tidal currents, deal with poor visibility and handle high-pressure water blasters in awkward spaces. Then there’s the crocodiles.
“Divers can work for only short periods because of fatigue,” adds Distinguished Professor Dikai Liu, who has led a team of researchers and engineers in developing intelligent underwater robots to address these health and safety issues.
Successful trials
The robots have been successfully trialled on a number of the 5,000 bridges in NSW. The technology has the potential to be used on the 50,000 bridges across Australia and at its 70 ports.
Currently, inspecting the underwater supports for these bridges and wharfs involves divers using high-pressure blasting – or scraping off by hand – encrusted marine growth, before checking the structures for damage or decay.
Until now that has meant a “sampling” approach, where a percentage of piles are selected for inspection. Of these piles, generally a strip is cleared from top to bottom and that is inspected, explains Prof Liu, who is a Distinguished Professor in Mechanical and Mechatronic Engineering and Director of CAS.
It’s an understandable approach, given the physical and cost hurdles to manually cleaning every pile on every piece of infrastructure. But it leaves open the possibility a problem could remain hidden, outside the cleaned strips and beyond the sample of piles.
Increasing the number of piles cleaned, and the area cleared, can only enhance infrastructure safety and longevity, Prof Liu says.
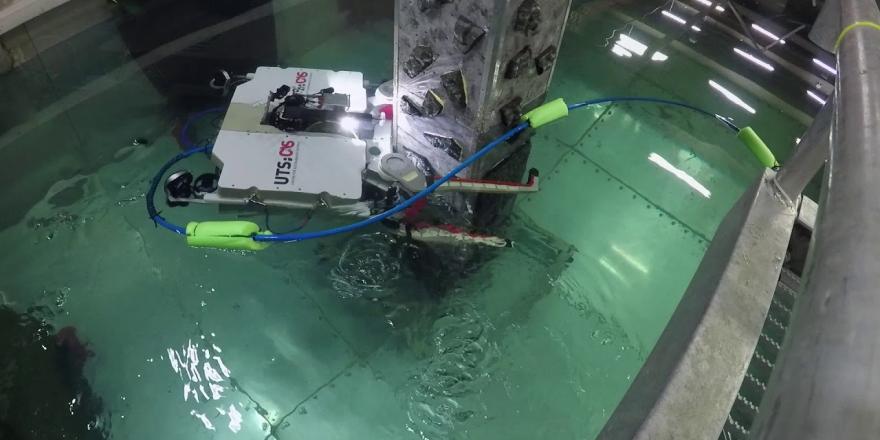
Researchers and engineers from CAS worked with the Roads and Maritime Service – tapping into the knowledge and experience of its divers – to come up with the submersible pile inspection robot, or SPIR. These robots have claw arms that allow them to grasp a pile, and other arms that conduct the surface cleaning using high-pressure water jets.
Cameras and sensors help give the robots environmental and operational awareness, with advanced algorithms and software code providing the “intelligence” required for the robot to do its work autonomously.
The SPIR navigates its way to a pile and maps the surface for marine growth, assessing factors such as the type of growth, its thickness and how hard or soft it is. Marine growth like barnacles or oysters can add a layer as much as 20 centimetres thick.
The robot moves around, and up and down, the pile, docking at different positions to plan and execute cleaning.
It then collects high definition images of the cleaned pile, building a 3D map of the structure to be used by the human inspection team to make a condition assessment.
Many uses
Prof Liu says the SPIR, currently in prototype, would improve the efficiency of underwater cleaning and maintenance because the robot can operate autonomously without stopping, and one operator can manage several robots at the same time. Productivity would be multiplied, meaning many more piles could be cleaned and inspected.
There would be wider savings, too. For instance, wharfs wouldn’t have to close while divers are at work cleaning and inspecting piles. Such a closure can cost a port authority up to $100,000 a day. The SPIR can operate safely even as ships continue to load and unload.
And the potential of the SPIR extends well beyond the piles supporting bridges and wharfs. Prof Liu says the robots could also be improved and then used to autonomously clean ship hulls, underwater pipes and tunnels, and the underwater supports for offshore structures such as oil rigs and wind farms – here and around the world.
Key researchers

Dikai Liu
Strategic Research Director & Distinguished Professor
Faculty of Engineering & Information Technology



Research Centre
Partners
- Roads and Maritime Services NSW (now part of Transport for NSW)
- Australian Research Council