Development of a Deployable Climbing Robot for the SHB Inspection and Condition Assessment

0:00-0:08 Regular inspection and maintenance of steel infrastructure is necessary to ensure integrity and prolong the life of services.
0:08-0:19 However, with more stringent work, health and safety requirements, inspectors are no longer able to inspect particular locations at heights or in confined spaces.
0:19-0:27 A machine capable of performing such inspections unassisted would highly valuable, improve safety and increase productivity.
0:28-0:42 Researchers and engineers from the University of Technology Sydney and the Roads and Maritime Services of NSW have developed an inchworm-inspired climbing robot which can automously explore and inspect complicated environments.
0:43-0:52 CROC, the autonomous climbing robot is inspired by the inchworm, consisting of a dexterous body with seven degrees of freedom and two magnetic feet.
0:52-0:56 An international patent application has been filed on the technology.
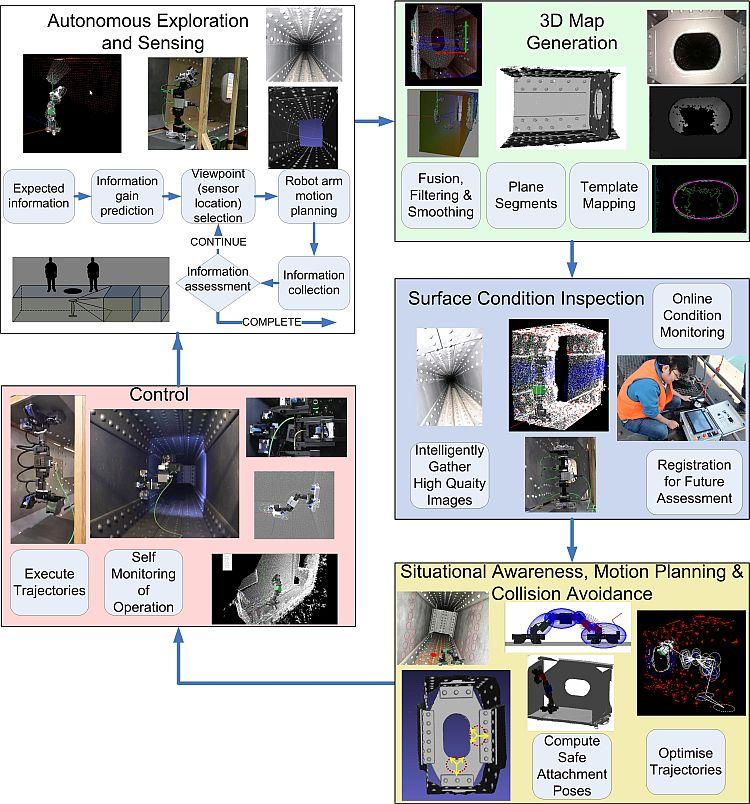
0:56-1:08 The robot is able to autonomously explore unknown and complex environments, build three-dimensional maps, identify forbidden zones, obstacles, manholes and plains.
1:09-1:23 Using the 3D maps, CROC is able to intelligently plan its own course by computing safe stepping locations, generate safe moving trajectories and avoid collision with obstacles identified in the environment.
1:23-1:26 The CROC system is portable and can be deployed easily.
1:27-1:34 The simple user interface allows inspectors to monitor the operation and view life video feed form CROC.
1:34-1:37 Confined spaced entry can be performed with minimal set-up.
1:47-1:54 The robot collects high definition images along its path, which is stored into a geographic information system.
1:58-2:02 This database can then be viewed remotely by bridge inspectors for condition assessment.
2:16-2:22 The robot is capable of passing through small manholes which prevent access by human inspectors.
2:38-2:50 CROC is capable of inspecting steel bridges in the transport industry, ship hulls in the maritime industry, transmission towers, power plants and offshore structures in the energy industry.
Direct YouTube link here.
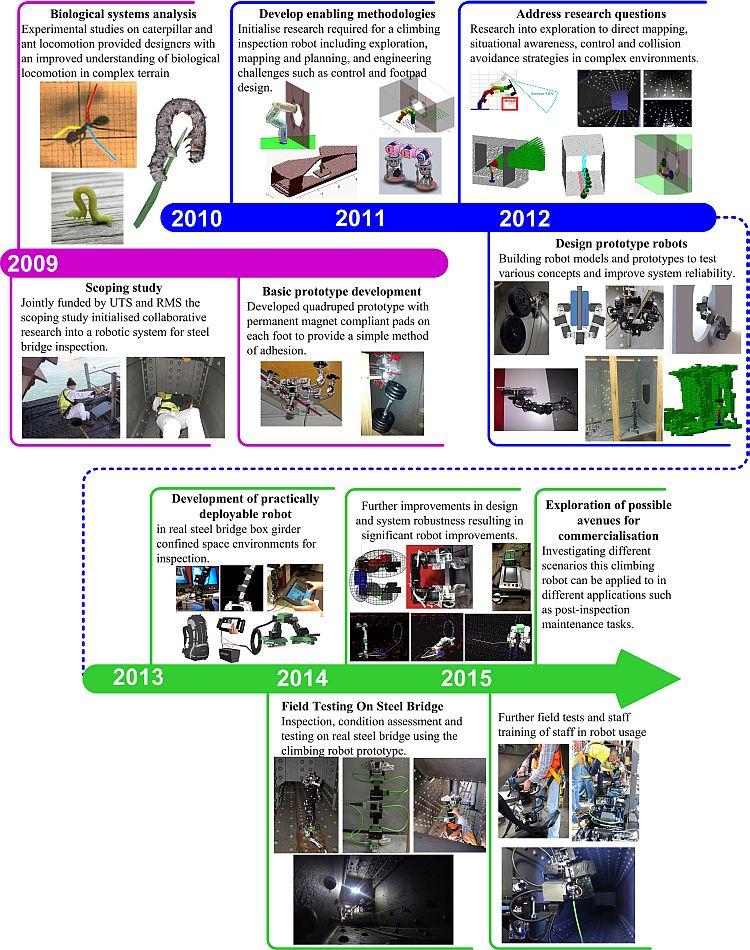
Funded by an ARC Linkage Project, UTS and RMS of NSW have been collaborating on research and development of biologically inspired robots for steel bridge inspection and condition assessment from 2010 to 2013. This research has addressed the research challenges and developed methodologies, including methods and algorithms for sensing, exploration, 3D map building, collision avoidance, control and robot design, that enables a climbing robot to navigate in steel bridge structures, collect bridge condition data and conduct condition assessment. A lot of engineering challenges has also been addressed including the design of the 7DOF inchworm robot and a novel adhesion pad. A prototype climbing robot has been developed and tested in field trials.
The project “Development of a Deployable Climbing Robot for the SHB Inspection and Condition Assessment” is Stage 2 of this research with the objective of developing one practically deployable climbing robot for the SHB inspection and condition assessment. This robot is expected to:
- be capable of navigating in the complex bridge structure and areas which are difficult for human workers to access (e.g. box girder structure)
- acquire information to facilitate condition assessment of steel bridge structures while greatly reducing the associated occupational health and safety risks
- be robust and reliable
- be easy to set up and relocate on a steel bridge
Chief Investigators
Partner Investigators
- Palitha Manamperi
- Philip Brooks
- Waruna Kaluarachichi
- Peter Mann, et al.
Other Members
Funding
- Roads and Maritime Services (NSW)
Year
- 2014–2015
Patent
- P. Ward, D.K.Liu, “Adhesion system for a climbing vehicle”, Australian Patent application number: 2013902595, filed 12 July 2013.
Media
- ABC News: http://www.abc.net.au/news/2016-02-05/sydney-harbour-bridge-maintenance-workers-rely-on-robot-helper/7145318
- ABC News (NSW), 7pm Friday, 5 February 2016
- The 2015 Asia Pacific ICTA Award: http://www.apicta.org/apicta-2015/apicta-2015-winners-and-merits
- The 2015 Safe Work NSW Awards Website: http://www.safeworkawards.com.au/
- The 2015 National iAwards Winners and Merit Recipients: https://www.iawards.com.au/history/2015
- Sydney Morning Herald, "A peek into our robotic future", 18 August 2015, http://www.smh.com.au/national/a-peek-into-our-robotic-future-20150811-giwju9.html
- CIO, "Autonomous robot scans steel structures", 18 August 2015, http://www.cio.com.au/article/582204/autonomous-robot-scans-steel-structures/
- YouTube video: https://www.youtube.com/watch?v=AP9KTw1WmLs
Awards
- 2015 Asia Pacific ICT Alliance (APICTA) Award in the Industry Application Category, "Bio-Inspired Autonomous Climbing Robot - A Revolutionary ICT Solution to Inspection and Maintenance of Steel Structures"
- 2015 SafeWork NSW Awards for the best solution to an identified workplace health and safety issue, "Bridge inspection robot", RMS of NSW and UTS
- 2015 iAwards National Merit Award in the New Product Category, "Biologically Inspired Climbing Robot", UTS and RMS of NSW
- 2015 iAwards New South Wales Merit Award in the New Product Category, "Biologically Inspired Climbing Robot", UTS and RMS of NSW
Functionalities and Features
Timeline
Conceptual Designs

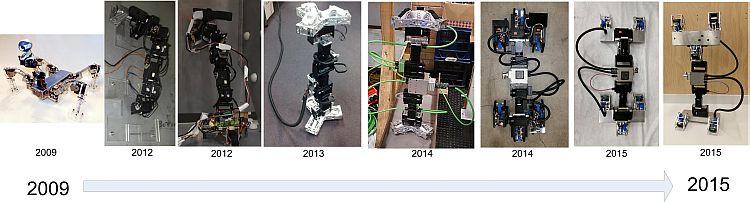
Evolution of Robot Designs
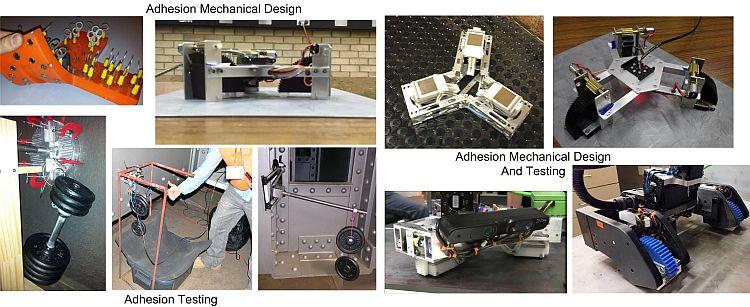
Evolution of Adhesion Footpad Design
Relevant Publications
- D.K. Liu, G. Dissanayake, J. Valls Miro, K.J. Waldron (2014), “Infrastructure Robotics: Research Challenges and Opportunities”, Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC 2014), 9-11 July 2014, Sydney, Australia, pp43-49
- Phillip Quin, Gavin Paul, Dikai Liu, Alen Alempijevic (2013), “Nearest Neighbour Exploration with Backtracking for Robotic Exploration of Complex 3D Environments”, Proceedings of Australasian Conference on Robotics and Automation, 2-4 Dec 2013, University of New South Wales, Sydney Australia, 8 pages
- P. Ward, D.K. Liu, K. Waldron and M. Hasan (2013), “Optimal Design of a Magnetic Adhesion System for Climbing Robots”, Proceedings of the 16th International Conference on Climbing and Walking Robots (CLAWAR), 14-17 July 2013, pp375-382
- P. Quin, G. Paul, A. Alempijevic, D.K. Liu, G. Dissanayake (2013), “Efficient Neighbourhood-Based Information Gain Approach for Exploration of Complex 3D Environments”, Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 6-10, 2013, pp1335-1340
- D. Pagano, D.K. Liu, K. Waldron (2012), “A method for optimal design of an inchworm climbing robot”, Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), December 11-14, 2012, Guangzhou, China, pp1293-1298
- P. Ward, D.K. Liu (2012), “Design of a high capacity electro permanent magnetic adhesion for climbing robots”, Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), December 11-14, 2012, Guangzhou, China, pp217-222
- A. Lozano, G. Peters, D.K Liu and K. Waldron (2011), “Study of ant locomotion in surface transitions for climbing robot design”, Proceedings of the 14th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR2011), September 6-8, 2011, Paris, France, pp173-180
- A. Lozano, G. Peters and D.K. Liu (2011), “Analysis of an arthropodal system for design of a climbing robot”, Proceedings of the 28th International Symposium on Automation and Robotics in Construction (ISARC 2011), 29 June - 2 July, 2011, Seoul, Korea, pp832-838
- G. Peters, D. Pagano, D.K. Liu and K. Waldron (2010), “A prototype climbing robot for inspection of complex ferrous structures”, Proceedings of the 13th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR'2010), pp150-156, 31 August - 03 September 2010, Nagoya, Japan